
 English
English
在Tesla市值正式超越Toyota後,自駕車的風潮再度席捲全球。根據2020 KPMG對各國自駕車成熟度排行榜(包含政府法規、技術創新、基礎建設、消費者接受度),台灣暫居世界第13名,本篇將會介紹自駕技術架構。
自駕車的架構從最前端蒐集感測辨識、高精圖資、車輛定位的資訊,到做出決策,本篇會著重在前端的資料蒐集。
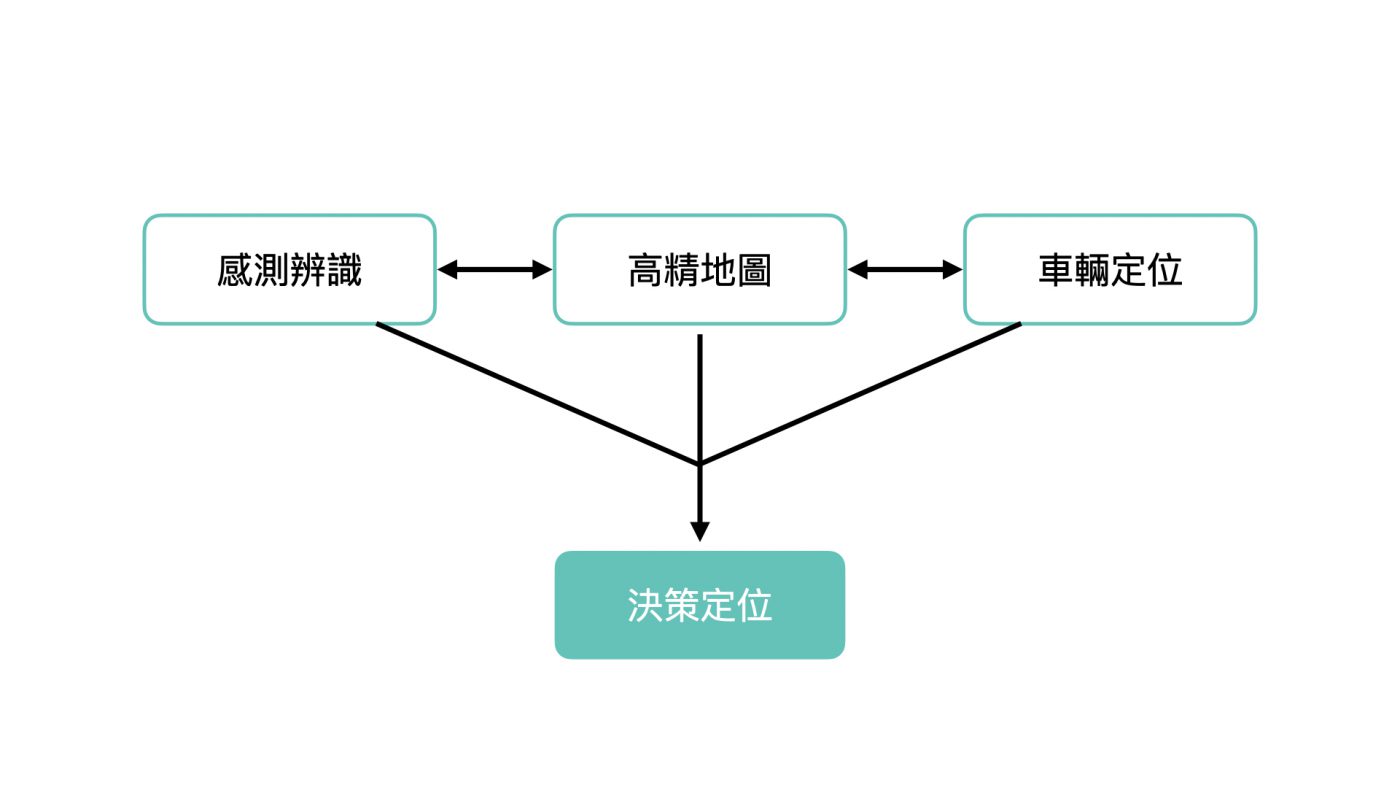
首先,感測辨識裝置不外乎攝影機、雷達、光達(Lidar)、超音波去做排列組合,而車廠分佈大致上以有無光達做為分界 –– 上述提到的特斯拉是採用8個攝影鏡頭、12個超音波感測器以及毫米波雷達的組合;Google 旗下自駕車公司 Waymo則是使用街景車光達的代表,關於各家廠牌所用的設備,可以參考由ARTC整理的圖表:高精圖資(Highly Automated Driving Map;縮寫HAD map)相對傳統的導航電子地圖,高精圖資能夠精準描繪出道路的形狀和細節,包括道路寬度、交通號誌都會精確顯示,最重要的是「公分」等級的精度,才能確保自駕車的行駛安全。

有了圖資之後,車輛所在位置就是決策判斷的最後一項要素。車輛定位上,GPS-RTK(GPS的應用,之後會再做介紹)輔以IMU(慣性感測器)是目前價格便宜同時能達到公分級定位的選擇,只是無法屏除GPS訊號遮蔽的隱憂;擁有光達的Waymo陣營,亦可以搭配3D點雲圖資的定位技術。
最後,如果車廠已經建立起高精地圖,車輛就能透過高精地圖提供的特徵點去辨識目前所在的位置。總結來說,自駕車除了需要即時蒐集道路狀況的感測器,高精度的圖資和定位技術同樣關鍵。司圖科技目前未涉足自駕車領域,但採用Waymo等級的光達繪製室內3D點雲圖,再整合場域中既有的無線訊號完成定位系統,一次補齊室內圖資與定位的需求!
#STOMAP#Tesla#Waymo#Google#圖資#定位#光達